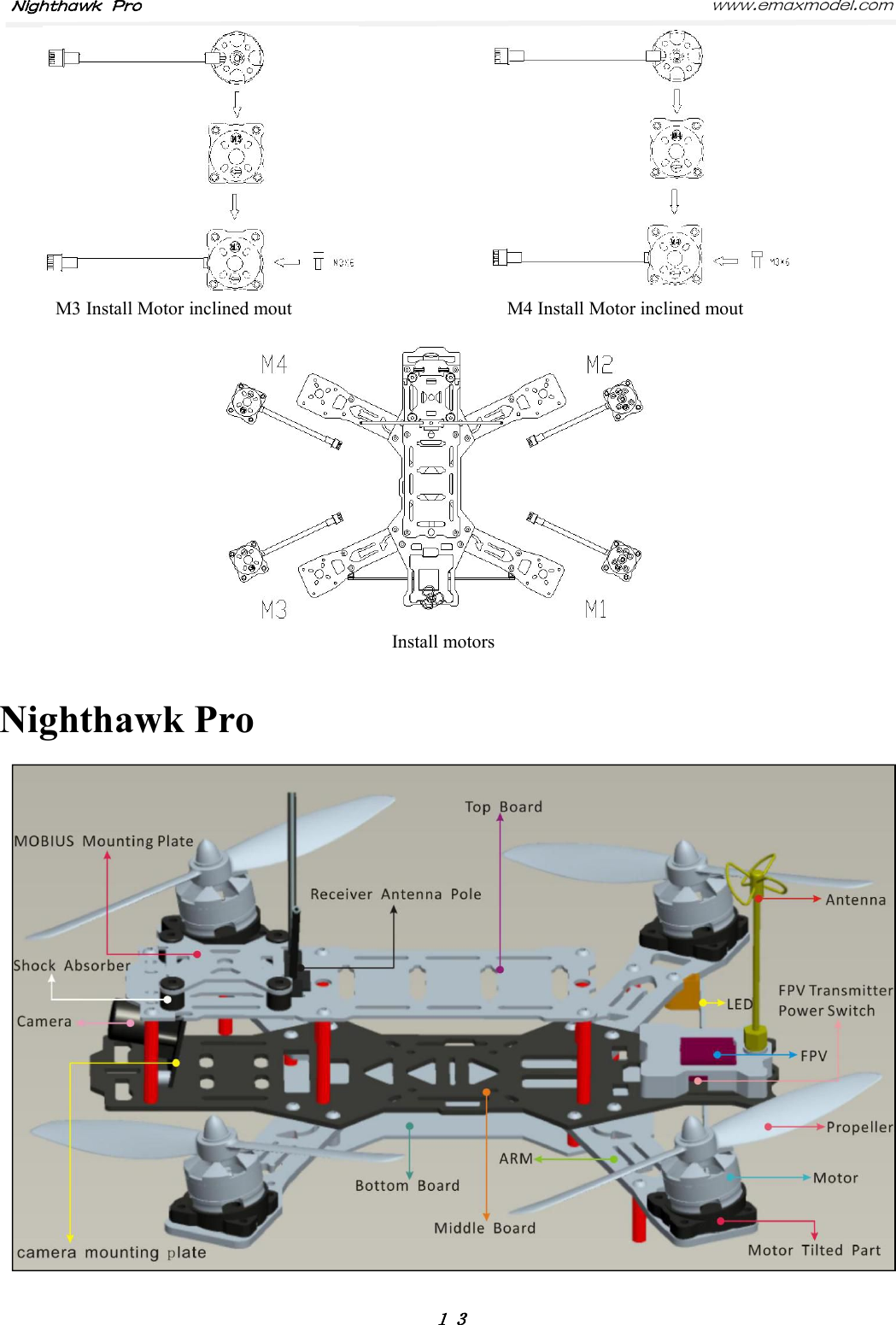
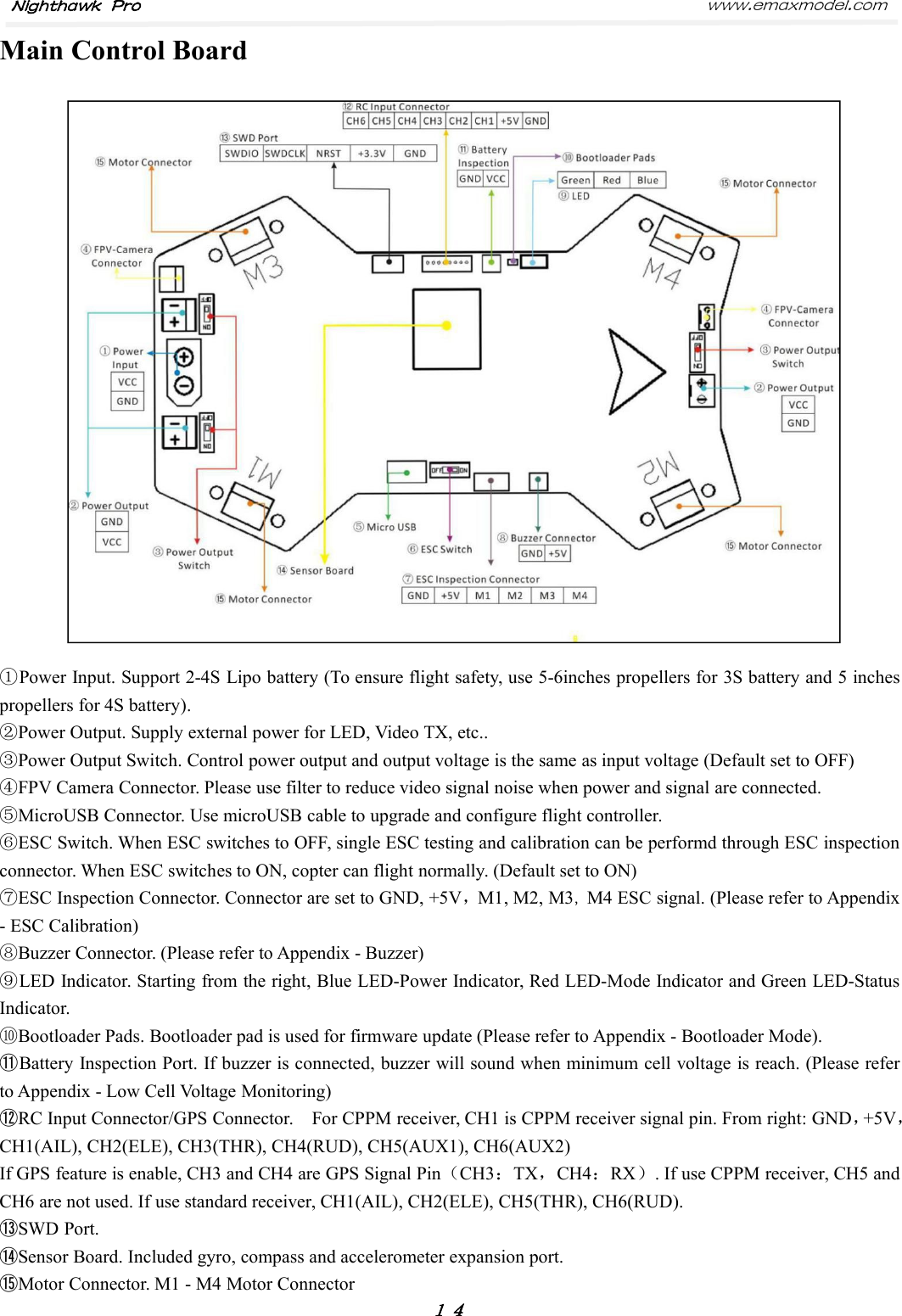
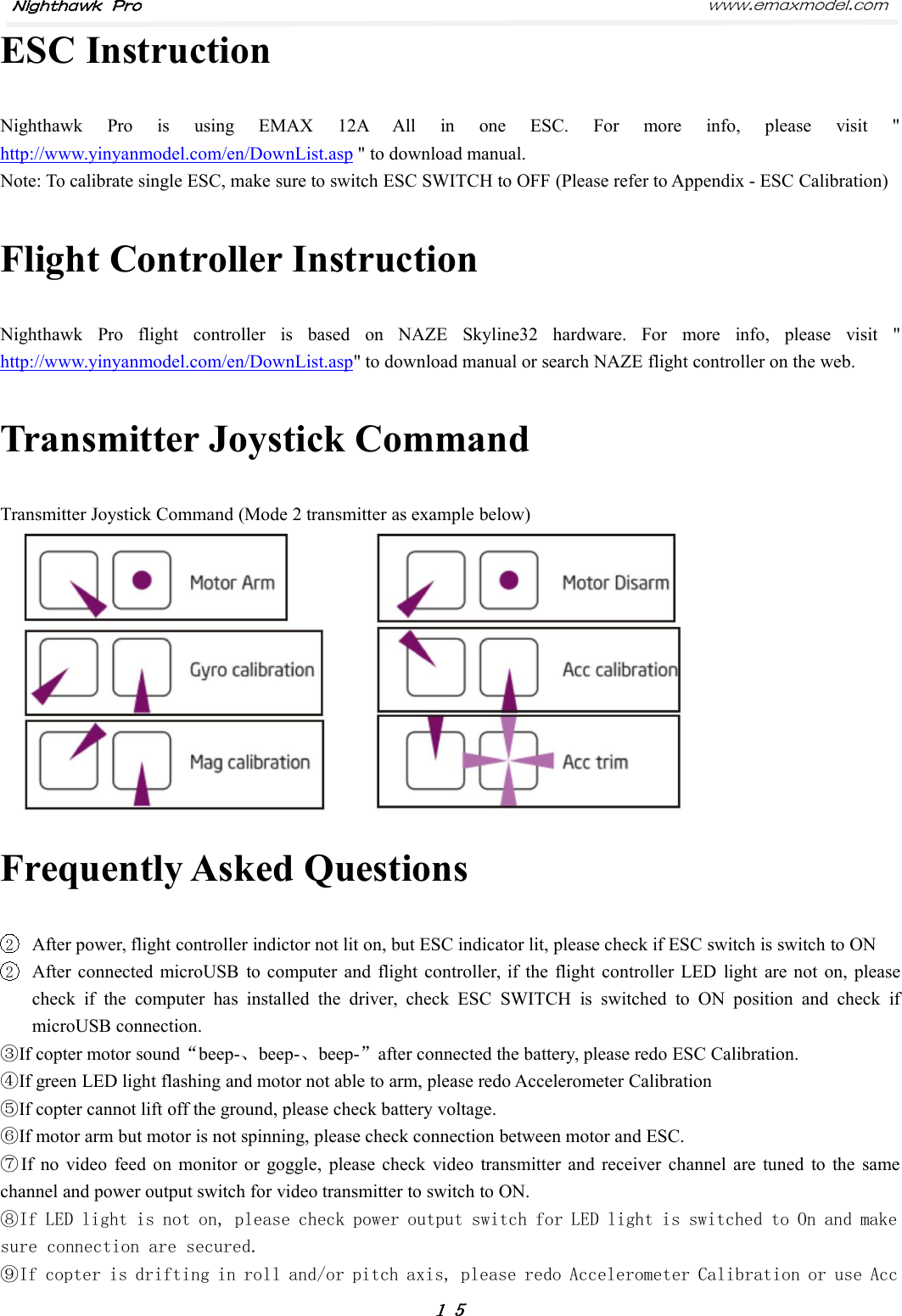
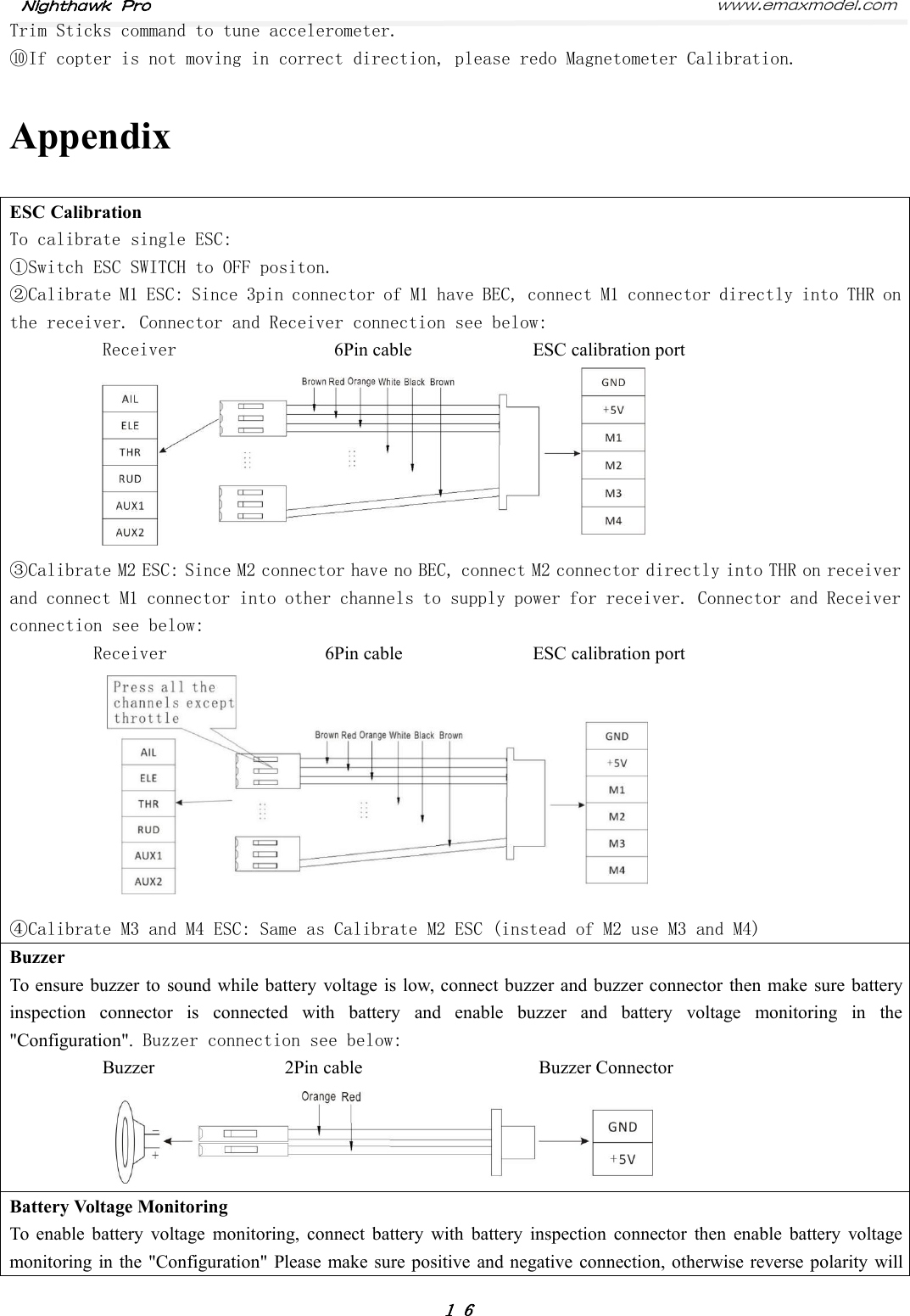
Dongguan Yinyan Electric Tech RTF 280 Multicopter User Manual
Dongguan Yinyan ElectricTech. Ltd. 280 Multicopter Users Manual
UserManual.wiki
>
Dongguan Yinyan Electric Tech
>
RTF User Manual
>
15_RTF UserMan
Contents
1.
15_RTF UserMan
2.
User_Manual
15_RTF UserMan
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation